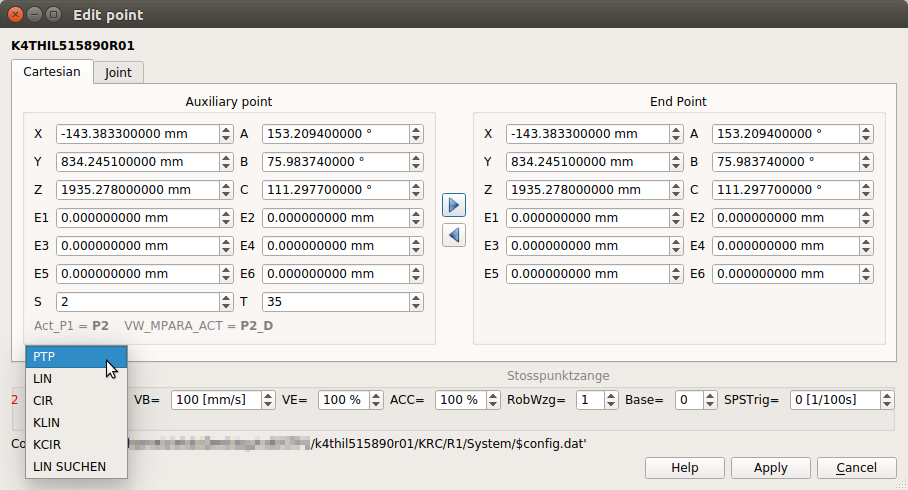
If the robot config file $config.dat was succesfully loaded by cell.src sellecting or manualy the apropiate message will be displayed on bottom left. If in the current config file there are any externals axes configured and availabe, suitable parameter box become editable and gives the user availability to change position for this axe.
Be aware to load correct $config.dat file before any changes.
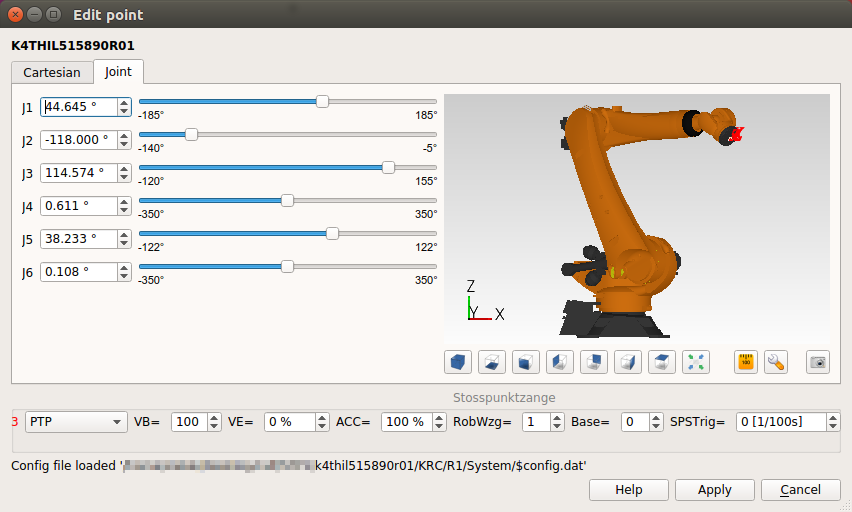
If the $config.dat file was loaded succesfully and there is an available CAD model a 3D robot model is shown.
You can move each joint separately in the defined robot working envelope.
See 3D Modelling for more information about this feature.
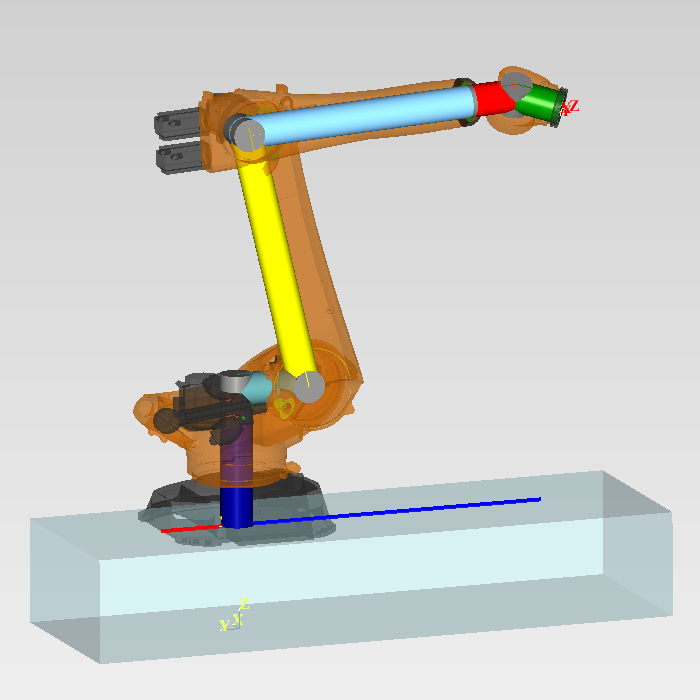
If the robot CAD model is not available the editor will display dummy robot shape.
The external linear unit is shown as cuboid under robot base.
The cuboid geometry has the same length as axis limits of the robot and height equal to the mount position of robot base.
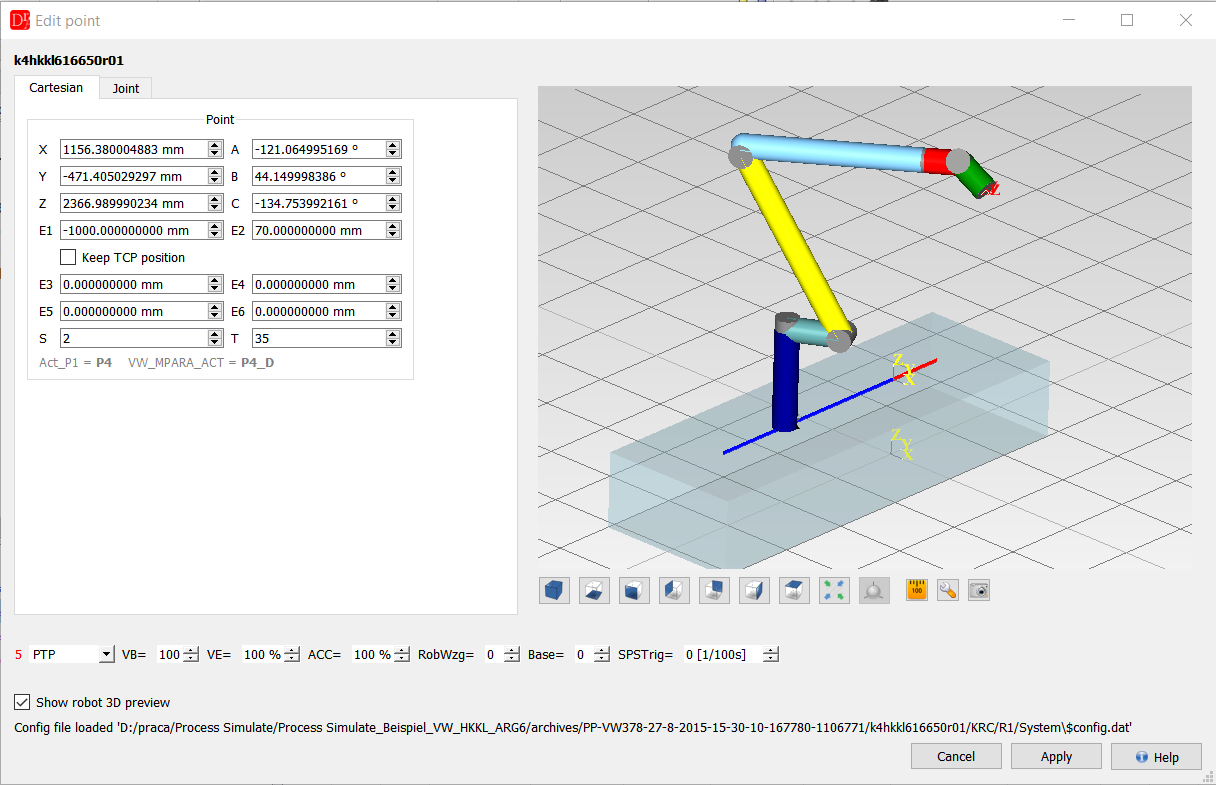
This shape corresponds to the real robot geometry.
For CIR and KCIR points the user can set start (auxiliary) and end point coordiantes.
For LIN SUCHEN point the user can set all required parameters for linear searching movement as well.
Point's coordiantes table
In the figure below you can see table with all point's coordiantes in the single program.
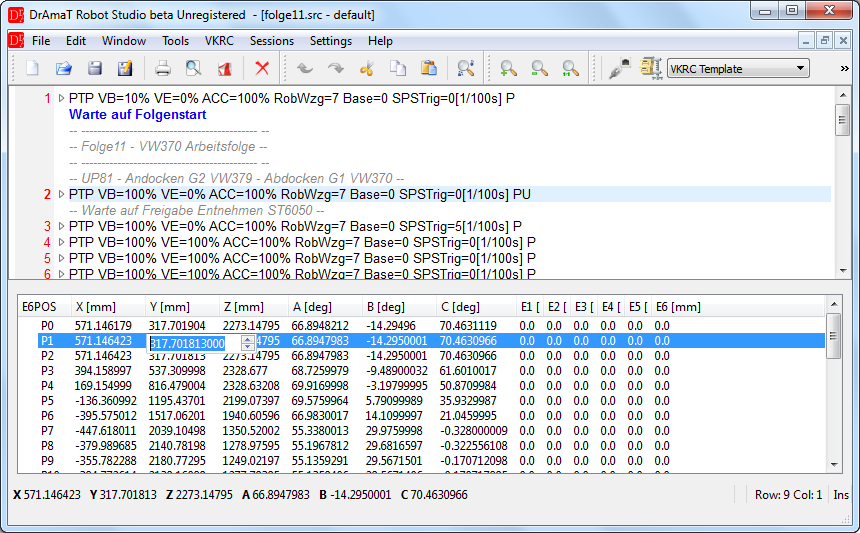
This widget is displayed for UP and Folge.
Double click one any cell with point's coordiante indicates line editor.
If you click double on the cell in the first column with point index in DAT file corresponding point in program editor will be selected.
For every selected point in program editor the corresponding point's coordiantes will be highlighted in this table.
For CIR and KCIR points normaly two rows with point's coordiantes will be selected.
For the selected row in the table user can copy point's coordiantes and assign them to one or more selected point in the point's table.
This option is available in context menu which is shown after pressing the right mouse button.