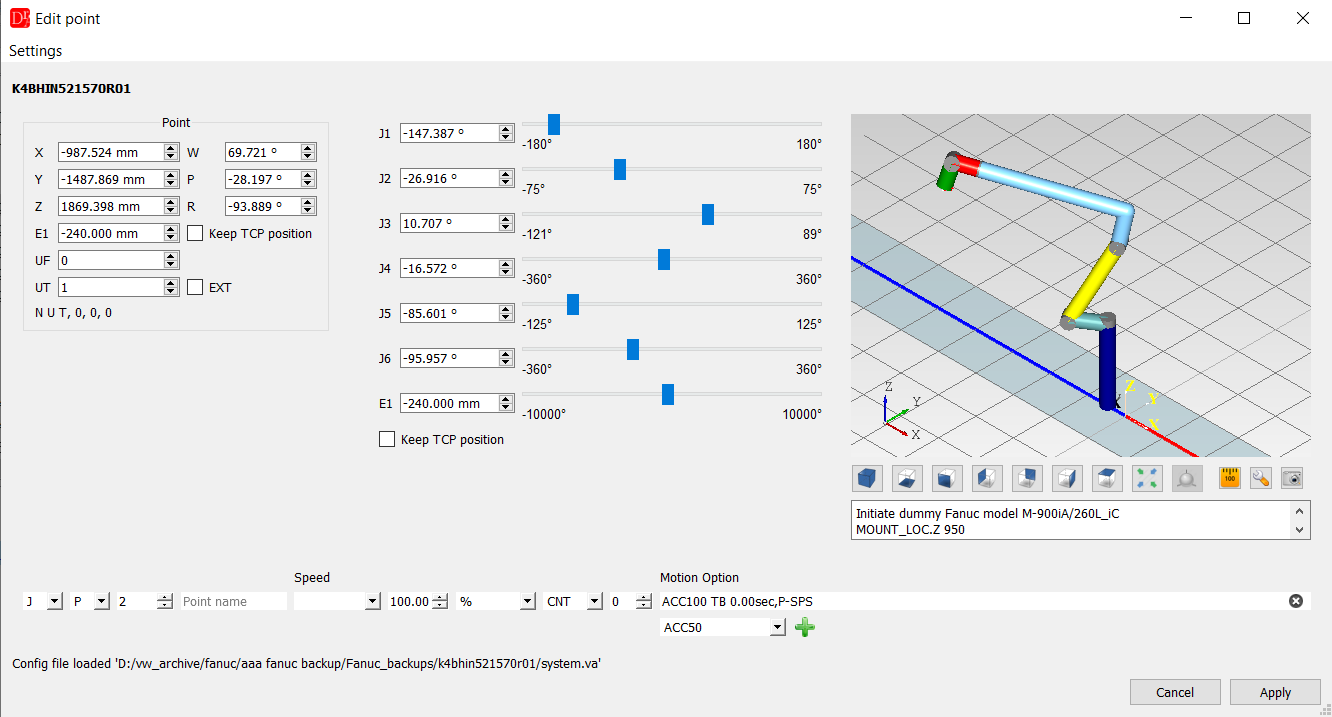
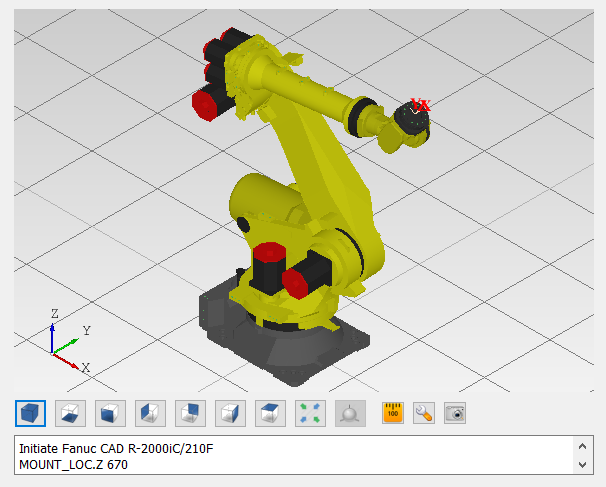
If the robot type was found in the CAD repository a real robot model will be displayed otherwise a dummy model will be shown.
See 3D Modelling for more information about this feature.
Point's coordiantes table
In the figure below you can see table with all points' coordiantes in the single program.
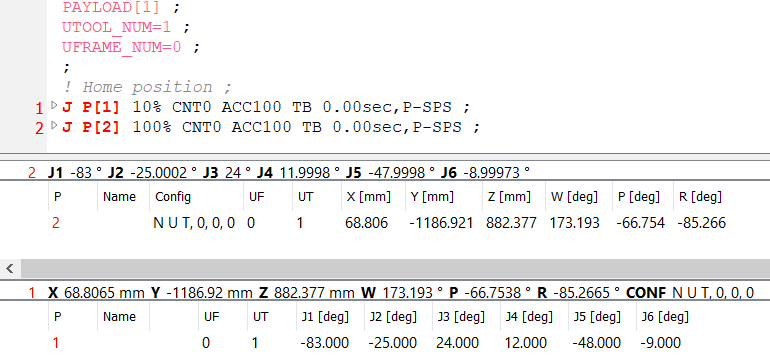
The user can edit certain values by double clicking on the cell.
After selecting a row, if the robot configuration file is available the inverse / forward position for the point is shown.
The context menu contains many additional features to help changing the values.